
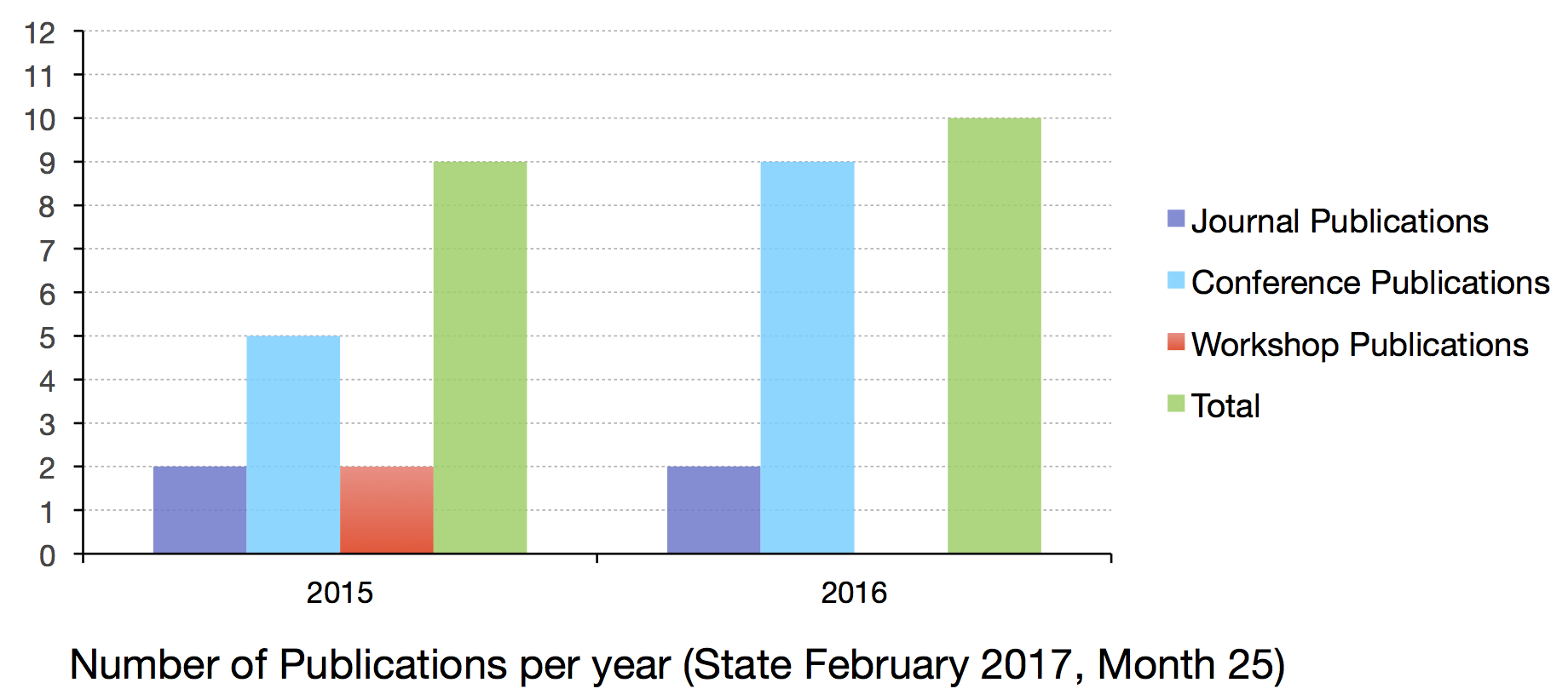
Dissemination activities include research publications, conference invited presentations and participation to exhibits and trade shows. A summary for the period 2014-2016 is given in the below table and plots. Research publications are listed below.
|
Journal Papers |
Conference Papers |
Exhibits and Trade Shows & invited presentations |
|
| 2014 | 1 | ||
| 2015 | 2 | 7 | 5 |
| 2016 | 2 | 9 | 1 |

Publications List
Giovanni Indiveri and Joao Gomes, Geophysical Surveying with Marine Networked Mobile Robotic Systems: The WiMUST Project, WUWNET '14 Proceedings of the International Conference on Underwater Networks & Systems Article No. 46, ACM New York, NY, USA, ISBN: 978-1-4503-3277-4, DOI: 10.1145/2671490.2677084
Habib Al-Khatib, Gianluca Antonelli, Andrea Caffaz, Andrea Caiti, Giuseppe Casalino, Ivan Bielic de Jong, Henrique Duarte, Giovanni Indiveri, Sergio Jesus, Konstantin Kebkal, Antonio Pascoal and Daniel Polani, Navigation, Guidance and Control of Underwater Vehicles within the Widely scalable Mobile Underwater Sonar Technology (WiMUST) Project: an overview, Proceedings of the 4th IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV’2015), 28th 30th April 2015, Girona, Spain, IFAC-PapersOnLine, Volume 48, Issue 2, 2015, pp. 189 -193, DOI: 10.1016/j.ifacol.2015.06.031
Habib Al-Khatib, Gianluca Antonelli, Andrea Caffaz, Andrea Caiti, Giuseppe Casalino, Ivan Bielic de Jong, Henrique Duarte, Giovanni Indiveri, Sergio Jesus, Konstantin Kebkal, Antonio Pascoal and Daniel Polani, The Widely scalable Mobile Underwater Sonar Technology (WiMUST) project: an overview, Proceedings OCEANS’15 MTS/IEEE Genova, 18-21 May 2015, Genova, Italy, pp 1-5, DOI: 10.1109/OCEANS-Genova.2015.7271688
Filippo Arrichiello, Daniela De Palma, Giovanni Indiveri, and Gianfranco Parlangeli, Observability analysis for single range localization, Proceedings of OCEANS’15 MTS/IEEE Genova, 18-21 May 2015, Genova, Italy, pp. 6-10, DOI: 10.1109/OCEANS-Genova.2015.7271684
Luis Silva, Joao Gomes, Sparse channel estimation and equalization for underwater filtered multitone, Proceedings of OCEANS’15 MTS/IEEE Genova, 18-21 May 2015, Genova, Italy, DOI:10.1109/OCEANS-Genova.2015.7271739
Oleksiy Kebkal, Veronika Kebkal, Konstantin Kebkal, EviNS: A Framework for Development of Underwater Acoustic Sensor Networks and Positioning Systems, Proceedings of OCEANS’15 MTS/IEEE Genova, 18-21 May 2015, Genova, Italy, DOI: 10.1109/OCEANS-Genova.2015.7271768
Daniela De Palma, Giovanni Indiveri, Antonio Pascoal, A Null-Space-Based Behavioral Approach to Single Range Underwater Positioning, Proceedings of the 10th IFAC Conference on Manoeuvring and Control of Marine Craft MCMC 2015 - Copenhagen, 2426 August 2015 IFAC - PapersOnLine, Volume 48, Issue 16, 2015, Pages 55-60, ISSN 2405- 8963, DOI: 10.1016/j.ifacol.2015.10.258
Daniela De Palma, Giovanni Indiveri and Gianfranco Parlangeli, Multi-vehicle relative localization based on single range measurements, Proceedings of the 3rd IFAC Workshop on Multivehicle Systems MVS 2015, 18 May 2015, Genova, Italy, IFAC-PapersOnLine, Volume 48, Issue 5, 2015, pp. 017 - 022, DOI: 10.1016/j.ifacol.2015.06.457
Giovanni Indiveri and Alessandro Malerba, Complementary control for robots with actuator redundancy: an underwater vehicle application, Robotica, Cambridge University Press 2015, ISSN 1469-8668, pp. 1-18, Available on CJO 2015, DOI: 10.1017/S0263574715000119
Gianfranco Parlangeli and Giovanni Indiveri, Single range observability for cooperative underactuated underwater vehicles, Annual Reviews in Control, Volume 40, 2015, pp. 129 - 141, DOI:10.1016/j.arcontrol.2015.09.008
F. Zabel, Vector Sensor Acquisition System (VSAS): a Project Plan, CINTAL Rep. 2/15, University of Algarve, December, 2015
Sergio Jesus, Distributed Sensor Array for Bottom Inversion, Proceedings of the IEEE/OES China Ocean Acoustics Symposium 2016, COA'2016, January 9-11, 2016, Harbin, China, 10.1109/COA.2016.7535771
D. Maslov, P. Felisberto and P.J. Santos, Vector Sensor Array Prototype (VSAP): Project Plan, CINTAL Rep. 1/16, University of Algarve, January, 2016
Sabina Zejnilović, Dieter Mitsche, João Gomes, Bruno Sinopoli, Extending the metric dimension to graphs with missing edges, Theoretical Computer Science (Elsevier), Volume 609, Issue 2, pp. 384–394, January 2016, DOI:10.1016/j.tcs.2015.10.022
Gianluca Antonelli, Andrea Caffaz, Giuseppe Casalino, Nicola Catenacci Volpi, Ivan Bielic de Jong, Daniela De Palma, Henrique Duarte, Jonathan Grimsdale, Giovanni Indiveri, Sergio Jesus, Konstantin Kebkal, Antonio Pascoal, Daniel Polani and Lorenzo Pollini, The Widely scalable Mobile Underwater Sonar Technology (WiMUST) H2020 project: First year status, OCEANS 2016 - Shanghai, Shanghai, 2016, pp. 1-8, DOI: 10.1109/OCEANSAP.2016.7485587
Giovanni Indiveri, Gianluca Antonelli, Filippo Arrichiello, Andrea Caffaz, Andrea Caiti, Giuseppe Casalino, Nicola Catenacci Volpi, Ivan Bielic de Jong, Daniela De Palma, Henrique Duarte, Joao Pedro Gomes, Jonathan Grimsdale, Sergio Jesus, Konstantin Kebkal, Elbert Kelholt, Antonio Pascoal, Daniel Polani, Lorenzo Pollini, Enrico Simetti and Alessio Turetta, Overview and first year progress of the Widely scalable Mobile Underwater Sonar Technology H2020 project, Proceedings of the 10th IFAC Conference on Control Applications in Marine Systems (CAMS 2016), Trondheim, Norway, September 13-16, IFAC-PapersOnLine, Volume 49, Issue 23, 2016, pp. 430 - 433, DOI: 10.1016/j.ifacol.2016.10.442
Pedro Abreu, Hélio Morishita, António Pascoal, Jorge Ribeiro, Henrique Silva, Marine Vehicles with Streamers for Geotechnical Surveys: Modeling, Positioning, and Control, Proc. 10th IFAC Conference on Control Applications in Marine Systems (CAMS 2016), Trondheim, Norway, Sept. 13-16, 2016, IFAC-PapersOnLine, Volume 49, Issue 23, pp. 458 - 464, DOI: 10.1016/j.ifacol.2016.10.448
Pedro Abreu, Gianluca Antonelli, Filippo Arrichiello, Andrea Caffaz, Andrea Caiti, Giuseppe Casalino, Nicola Catenacci Volpi, Ivan Bielic de Jong, Daniela De Palma, Henrique Duarte, Joao Pedro Gomes, Jonathan Grimsdale, Giovanni Indiveri, Sergio Jesus, Konstantin Kebkal, Elbert Kelholt, Antonio Pascoal, Daniel Polani, Lorenzo Pollini, Enrico Simetti and Alessio Turetta, Widely scalable Mobile Underwater Sonar Technology: an overview of the H2020 WiMUST project, Journal of Marine Technology Society, Volume 50, Issue 4, pp. 42-53, 2016, DOI: 10.4031/MTSJ.50.4.3
Nicola Catenacci Volpi, Daniela De Palma, Daniel Polani and Giovanni Indiveri, Computation of Empowerment for an Autonomous Underwater Vehicle, 9th IFAC Symposium on Intelligent Autonomous Vehicles, IAV 2016, Leipzig, Germany, 29 June 2016 to 01 July 2016, IFAC-PapersOnLine, Volume 49, Issue 15, 2016, pp. 81 - 87, DOI: 10.1016/j.ifacol.2016.07.713
P. Felisberto, P. Santos, D. Maslov, S.M. Jesus, Combining pressure and particle velocity sensors for seismic processing, Proceedings of OCEANS'16 MTS/IEEE, Monterey, USA, 2016, DOI: 10.1109/OCEANS.2016.7761222
A. Mantouka,P. Felisberto, P. Santos, D. Maslov, F. Zabel, M.Saleiro, S.M. Jesus and L. Sebastião, Development and testing of a Dual Accelerometer Vector Sensor for AUV acoustic surveys, The 3rd International Electronic Conference on Sensors and Applications (ECSA 2016), 15–30 November 2016, Sciforum Electronic Conference Series, Volume 3, 2016, DOI:10.3390/ecsa-3-E011
Filippo Arrichiello, Gianluca Antonelli, and Elbert Kelholt, Shape estimate of a streamer of hydrophones towed by an Autonomous Underwater Vehicle, Proceedings of the 10th IFAC Conference on Control Applications in Marine Systems (CAMS 2016), pp. 181-186, 2016. DOI: 10.1016/j.ifacol.2016.10.340
Beatriz Q. Ferreira, João Gomes, Cláudia Soares, João P. Costeira, Collaborative localization of vehicle formations based on ranges and bearings, Proceedings of the Third IEEE Underwater Communications and Networking Conference (UComms’16), Lerici, Italy, August 30-September 1, 2016, DOI: 10.1109/UComms.2016.7583426