
Project Overview
Project page on CORDIS: http://cordis.europa.eu/project/rcn/194287_en.html
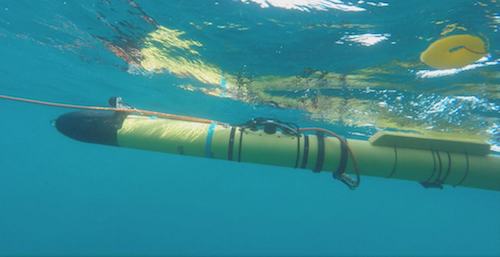
WiMUST aims at conceiving, designing, and engineering an intelligent, manageable, distributed and reconfigurable underwater acoustic array that could drastically improve the efficacy of the methodologies used to perform geophysical and geotechnical acoustic surveys at sea.
The novel key feature of the WiMUST system consists in the use of a team of cooperative autonomous marine robots, acting as intelligent sensing and communicating nodes of a reconfigurable moving acoustic network.
Recent developments have shown that there is vast potential for groups of marine robots acting in cooperation to drastically improve the methods available for ocean exploration and exploitation. Traditionally, seismic reflection surveying is performed by vessel towed streamers of hydrophones acquiring reflected acoustic signals generated by acoustic sources (either towed or on-board a vessel). In this context, geotechnical surveying for civil and commercial applications (e.g., underwater construction, infrastructure monitoring, mapping for natural hazard assessment, environmental mapping, etc.) aims at seafloor and sub-bottom characterization using towed streamers of fixed length that are extremely cumbersome to operate. The vision underlying the WiMUST proposal is that of developing advanced cooperative and networked control / navigation systems to enable a large number (tens) of marine robots (both on the surface and submerged) to interact by sharing information as a coordinated team (not only in pairs).
The project brings together a group of research institutions, geophysical surveying companies and SMEs with a proven track record in autonomous adaptive and robust systems, communications, networked cooperative control and navigation, and marine robot design and fabrication.
Fields of Application
The employment of WiMUST system will result beneficial in a vast number of applications in the fields of civil engineering and oil & gas industry, where seabed mapping, seafloor characterization, and seismic exploration are fundamental operations.
WiMUST system will provide advancements in all areas of marine robotics having a functional role in setting up a robotic distributed sonar system with autonomous mobile nodes, by greatly facilitating the operations at sea, thanks to the lack of physical ties between a surface ship and the acquisition equipment. All the mission phases, from deployment to recovery, will therefore result highly simplified with consequent sensible savings of mission time and operative costs.
The main area of impact are:
Underwater Cooperative Robot Navigation and Control;
Distributed Sensor Arrays and Applications;
Intersensor communications;
Underwater cooperative robot navigation and control.
A new method for Seismic acoustic surveys
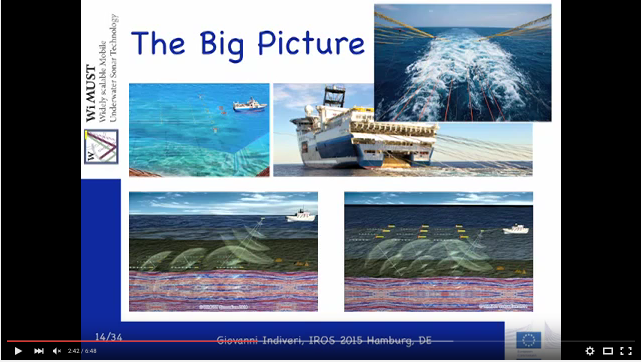
Traditionally, seismic acoustic surveys are done using a vessel that tows a powerful acoustic source and group of streamers of hydrophones. Post-processing of the data acquired will reveal the detail of sub bottom structures of interest. Both the geometry of the complete array of hydrophones and their relative positions with respect to the source are therefore fixed a priori. Detection, localization and identification of bottom and specially sub-bottom structures is a daunting task for the extents to be covered, the depths involved and the difficulty to discriminate false/true acoustic returns in complex operational scenarios. Bottom surface mapping is currently obtained from sidescan or multibeam surveying which can be done using devices towed from ships or embarked on autonomous vehicles. The usage of a coordinated swarm of vehicles would greatly enhance the search by a factor that depends on the number of available / necessary robots and on the effectiveness of the coordination. The vision underlying the WiMUST project is to decouple the acoustic source from the receivers and to impart independent motions to groups of the latter so that they can be ”acoustically excited” from different angles and change their geometry according to the mission being performed.


WiMUST system (right) for sub-bottom profiling with source - receiver decoupling versus a representation of the traditional ship towed methodology (left).
Evaluation of the achievements
The achievement of the project objectives will be measured through experimental activities driven by the end-user industrial partners and executed with the suite of vehicles already available in the consortium. Despite the size of the operated team shall be of around ten vehicles, all the solutions developed during the project will be designed and developed by taking in mind the mid-long term vision motivating the overall WiMUST research: i.e. performing underwater missions with large numbers of autonomous cooperating robots. While the project achievements shall be tested in shallow water, the project methodologies are going to be immediately applicable also to deep water scenarios. Indeed the scientific developments and the technological innovations of WiMUST project will be exploitable in additional underwater domains, for enabling the execution of important tasks like those related with search and rescue operations, environmental monitoring and surveillance applications, demining, spill detection and plume tracking, underwater archaeology, and fishery.